Jei pažiūrėjote aukštos skiriamosios gebos „HiRISE“ vaizdus iš „Mars Reconnaissance Orbiter“ ar turėjote galimybę ištirti naująjį „Google Mars“, žinote, kad „Mars“ yra kupinas kraterių, kalnų, pilkapių ir visokių įdomių - ir pavojingų - reljefo . Tokios zonos, kur yra sluoksninių nuosėdų, nuosėdų, lūžimų ir gedimų, yra tik tos vietos, kur reikia ieškoti Marso gaminamų metano šaltinių. Tačiau per daug rizikinga nusiųsti mūsų dabartinį motociklų stilių, įskaitant 2011 m. Marso mokslo laboratoriją (MSL), į klastingą reljefą. Bet JPL inžinieriai kartu su Kalifornijos technologijos instituto studentais sukūrė ir išbandė universalų, nedidelės masės robotą, kurį būtų galima pridėti prie didesnių roverių, tokių kaip MSL, kurie gali atlėkti nuo uolų, greitai keliauti per kietą ir uolėtą reljefą ir tyrinėti gilūs krateriai.
Šis roverio prototipas, vadinamas „Axel“, gali padėti ateities robotams erdvėlaiviams geriau tyrinėti ir ištirti tokius užsienio pasaulius kaip Marsas. Žemėje Axelis gali padėti vykdyti paieškos ir gelbėjimo operacijas.
„„ Axel “praplečia mūsų galimybes tyrinėti reljefą, kurio mes anksčiau netyrėme, pvz., Gilius kraterius su vertikaliai nuolydžiu įkyriais“, - teigė „Axel“ vyriausiasis tyrėjas Issa A. D. Nesnas iš JPL robotikos ir mobilumo skyriaus. „Be to, kadangi„ Axel “masė palyginti nedidelė, misija gali gabenti daugybę„ Axel “vilkikų. Tai suteiktų mums galimybę būti agresyvesniems tiriamo reljefo atžvilgiu ir kartu valdyti bendrą riziką. “
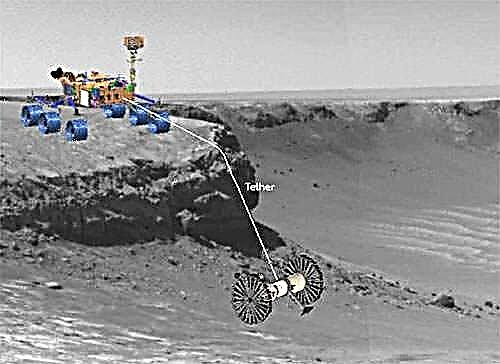
Nesnas teigė, kad „Axel“ yra tarsi „yo-yo“ - jis yra ant liežuvio, pritvirtinto prie didesnio roverio, ir gali eiti aukštyn ir žemyn kraterių, kanjonų ir pilkapių šonus, tyrinėdamas regionus, nesaugius kitiems roveriams.

Paprastoje ir elegantiškoje „Axel“ konstrukcijoje, galinčioje veikti tiek aukštyn kojomis, tiek dešine puse į viršų, naudojami tik trys varikliai: vienas - valdyti abu savo ratus, o trečias - svirtį. Svirtyje yra kastuvas, skirtas mokslininkams tyrinėti mėnulio ar planetos medžiagą. Taip pat jis sureguliuoja roboto dvi stereo kameras, kurios gali pakreipti 360 laipsnių.

Cilindrinis „Axel“ korpusas turi skaičiavimo ir bevielio ryšio galimybes bei inercinį jutiklį, kuris veikia autonomiškai. Tai taip pat sportinis pririšimas, per kurį Akselis gali nenusileisti nusileisti nuo didesnio nusileidimo taško, roverio ar tvirtinimo taško. Roveris gali naudoti įvairius ratų tipus, nuo didelių sulankstomų ratų iki pripučiamų, kurie padeda roveriui toleruoti sunkų nusileidimą ir įveikti uolėtą reljefą.
„Axel“ vystėsi nuo 1999 m., O Caltech, Purdue universiteto ir Arkanso technikos universiteto studentai bėgant metams bendradarbiavo su JPL kurdami šį universalų roverį.
Norėdami gauti daugiau informacijos apie „Axel“, skaitykite JPL „Axel“ puslapyje ir „Caltech“ „Axel“ svetainėje.