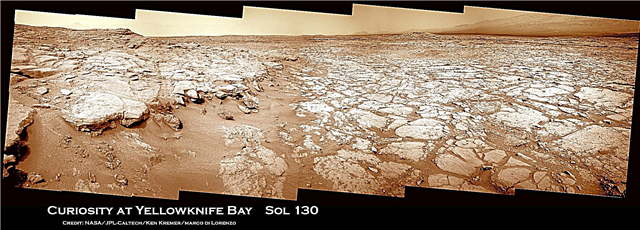
Vaizdo fiksavimas: Smalsumas nuskaito „Yellowknife Bay“ „Sol 130. 17“, kuris buvo susiūtas iš navigacijos kameros („Navcam“) vaizdų. Kreditas: NASA / JPL-Caltech / Kenas Kremeris / Marco Di Lorenzo
Šiandien (gruodžio 25 d.) „Curiosity“ švenčia pirmąsias Kalėdas ant Marso vietoje, pavadintoje „Yellowknife Bay“. Tai yra „Sol 138“ ir praėjo beveik 5 mėnesiai po to, kai pulsuojantis lėktuvas nusileido 2012 m. Rugpjūčio 6 d. Gale krateryje. Robotas yra geros sveikatos.
Tuo tarpu jos vyresnioji sesuo „Opportunity“ per keletą trumpų savaičių, 2013 m. Sausio 24 d., Netrukus, švęs nepakartojamus 9 Žemės metus Marse - kitoje planetos pusėje.
NASA automobilis „Curiosity“ pasiekė seklią įdubimą pavadinimu „Yellowknife įlanka“ „Sol 130“ (2012 m. Gruodžio 17 d.), Nusileidęs maždaug 0,5 pėdos žemyn link švelnaus šlaito geologinio objekto, praminto „Glenelg“, viduje. Peržiūrėkite mūsų panoramines mozaikas iš Yellowknife įlankos - aukščiau ir apačioje, norėdami pamatyti kontekstą.
Mokslo komanda ieško įdomios uolienos, skirtos inauguraciniam didelio galingumo kūjo grąžto naudojimui.
Remiantis nauja „SpaceRef“ ataskaita, gręžimas buvo atidėtas dėl susirūpinimo, kad dėl frikcinio kaitinimo gali susidaryti kliūtis, kuri gali suskaidyti iki „Marso medaus“, kuris gali užkimšti ir rimtai sugadinti mėginių tvarkymo sietus ir mechanizmus. Taigi komanda kruopščiai peržiūri uolienų taikinio tipą ir gręžimo operacijas, prieš pradėdami pirmą kartą naudoti mušamąjį grąžtą, esantį bokštelyje roboto rankos gale.
Komanda pasirinko nuvažiuoti į „Yellowknife Bay“, nes jame yra kitokio tipo geologinis reljefas, palyginti su tuo, kurį „Curiosity“ važiavo anksčiau. „Glenelg“ sritis yra trijų skirtingų rūšių geologinio reljefo sankryžoje ir yra „Curiosity“ pirmasis išplėstas mokslo tikslas.
Smalsumas atkeliavo į Geltonojo Nafto įlankos lūpas „Sol 124“ automobiliu ir pateko į baseiną „Sol 125“ (gruodžio 12 d.) Ir užfiksavo žvalgų panoraminį vaizdą, nukreiptą į kviečiančią vietą. Roveris taip pat naudoja APXS rentgeno spindulių mineralų spektrometrą, „ChemCam“ lazerį ir MAHLI rankinių objektyvų imtuvą, kad surinktų pradinius mokslo apibūdinimo duomenis.

Smalsumo viršūnės aplink Yellowknife įlanką Sol 125, 2012 m. Gruodžio 12 d. Roveris toliau važiavo baseino viduje ieškodamas pirmojo akmenų gręžimo tikslo. Kreditas: NASA / JPL-Caltech / Kenas Kremeris / Marco Di Lorenzo
Iki šiol bendras roverio nuvažiavimo atstumas buvo maždaug 0,43 mylios (700 metrų).
Didžioji dalis mokslo ir inžinerijos komandos padaro labai reikalingą pertrauką, kad galėtų praleisti laiką su savo šeimomis, prieš tai įkeldami 11 Sols vertės užsiėmimų, kad kalėdiniu atostogų laikotarpiu robotas nevargtų. JPL skeleto įgula budi, kai reikia spręsti bet kokius nenumatytus atvejus.
Vienas iš svarbiausių prioritetų yra aukštos skyros „360 laipsnių Mastcam“ spalvų panoramos įsigijimas. Tai bus neįkainojama renkantis patį pirmąjį uolos taikinį, kurį reikia išgręžti ir iš jo paimti pavyzdį - žygdarbis, kuris dar niekad nebuvo bandytas ant Marso.
„Mes nusprendėme nuvažiuoti į vietą, iš kurios gerai matosi atodangos, supančios Geltonkeifo įlanką, kad būtų galima gerai vaizduoti šiuos atodangus prieš atostogų pertrauką“, - sako „rover“ mokslo komandos narys Kenas Herkenhoffas. „Kadangi vaizdai grąžinami pertraukos metu, mes galime juos naudoti norėdami padėti nuspręsti, kur atlikti pirmąją gręžimo operaciją.“
Po kruopštaus atrankos proceso komanda tikisi pasirinkti gręžimo tikslą kada nors 2013 m. Sausio mėn.
7 pėdų (2 m) ilgio robotinė ranka tą pradinį, susmulkintą uolienų mėginį pateks į roverio denio įleidimo angas, kad galėtų atlikti analizę miniatiūrinių chemijos laboratorijų, turinčių didelę galią, pavadinimu „Chemin & SAM“.

Vaizdo fiksavimas: „Curiosity“ naudoja „Sol 129“ roboto ranką ir tiria uolieną naudodama APXS ir MAHLI mokslo instrumentus, kad apibūdintų uolienų ir dirvožemio sudėtį. Ši sudėtinė mozaika buvo susiūta iš „Navcam“ atvaizdų iš „Sol 129“ (gruodžio 16 d.) Ir ankstesnių solų - ir parodo „Chemin“ mėginio įleidimo angos vietą roverio denyje. Kreditas: NASA / JPL-Caltech / Kenas Kremeris / Marco Di Lorenzo
Smalsumas praleis dar bent mėnesį ar dar daugiau, kad ištirtų Glenelgą, prieš pradėdamas beveik metus truksiančią kelionę į savo pagrindinę vietą - 3 mylių (5 km) aukščio kalno, pavadinto Sharp kalnu, žemupio nuosėdinius sluoksnius.

Vaizdo antraštė: Nuskaitymas „Sharp Mount Sharp“ iš Yellowknife įlankos, naudojant „Sol 136“. Šią „Mastcam 100“ fotoaparato atvaizdų surinktą nuotraukų mozaiką „Curiosity“ užfiksavo „Sol 136“ (gruodžio 23 d.) - iš savo dabartinės vietos. Tai rodo daugiasluoksnio piliakalnio, vadinamo „Sharp Mount“, pagrindinę jos paskirtį, dalis. Įsigyti 360 aukštos skiriamosios gebos spalvų panoramą iš Yellowknife įlankos yra labai svarbus prioritetas roveriui per kalėdinį atostogų sezoną. Kreditas: NASA / JPL-Caltech / Marco Di Lorenzo / Kenas Kremeris
Skrendant Marso varna, kvapą gniaužiantys Sharp kalno apylinkės yra už 10 mylių.
Misijos tikslas yra ieškoti buveinių ir išsiaiškinti, ar Marsas kada nors galėjo palaikyti mikrobų gyvenimą praeityje ar dabartyje 2 metų pirminės misijos metu.

Vaizdo antraštė: „Curiosity Traverse Map“, „Sol 130“. Šis žemėlapis atsekia „Curiosity“ važiavimą tarp nusileidimo vietoje, pavadintoje „Bradbury Landing“, ir padėties, pasiektos per „Sol 130“ (2012 m. Gruodžio 17 d.) Vietoje, pavadintoje „Yellowknife Bay“, kuri yra srityje, vadinamoje „Glenelg“. Įdėklas išsamiau parodo naujausias traverso kojas. Kreditas: NASA / JPL-Caltech / Univ. iš Arizonos