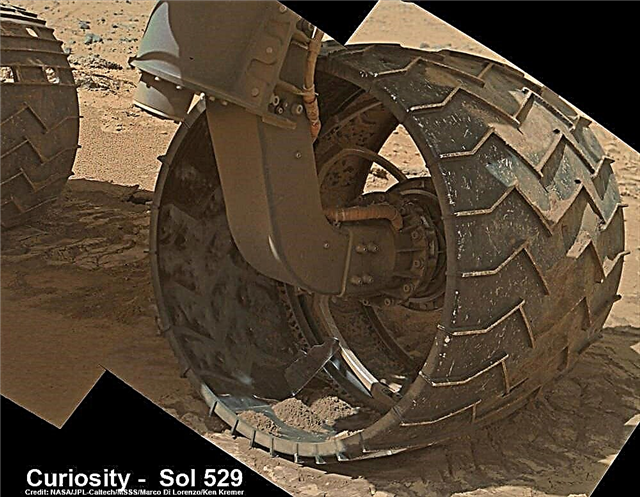
Iš arti esančioje fotomosazikoje rodoma ilga „Roverio“ kairiojo priekinio rato ašarojimas, kurį neseniai sukėlė aštrių briaunų Marso uolos, vykstančios per keletą mėnesių ilgą žygį į Sharp kalną. 2014 m. Gruodžio 31 d. („Sol 529“) buvo surinkti siekiant parodyti nesenus kelių jo šešių ratų apgadinimus.
Kreditas: NASA / JPL / MSSS / Marco Di Lorenzo / Kenas Kremer- kenkremer.com
Žemiau žiūrėkite pilną 6 ratų mozaiką ir „Dingo Gap“ kopų alternatyvią mozaiką kartu su trimačiu vaizdu [/ antraštė]
Dėl nuolatinių ratų sugadinimo dėl aštrių kraštų Marso uolienų inžinieriai priversti inžinierių ieškoti sklandesnio kelio į priekį - galbūt per klastingą kopos lauką - NASA „Curiosity“ roveriui ant nelygių uolų nutiesto kelio į Sharp kalną, kuris yra jos pagrindinis mokslo tikslas.
Nuo tada, kai „rover“ inžinieriai pastebėjo skyles ir ašaras robotams šešiuose aliuminio ratuose praėjusį 2013 m. Rudenį ir žiemą, komanda daug dažniau fotografavo ratus ir atidžiai vertino jų būklę. Peržiūrėkite mūsų mozaikas aukščiau ir žemiau.
„Smalsumo“ prižiūrėtojai dabar svarsto, kaip visureigio dydžio robotą nukreipti į alternatyvų kelią, kertantį kopų lauką ir slėnį, už jo einant per daug sklandesnį Marso reljefą, norint pasiekti labai pageidaujamą ir netoliese esančią mokslo vietą, vadinamą „KMS-9“.
Naujai gauti vaizdai, kuriuos robotas nufotografavo tik penktadienį, sausio 31 d., Rodo labai didelę, 5–8 cm ilgio, maždaug 3 cm pločio ir maždaug 3 cm pločio, skilinėjančią punkciją. kairiojo priekinio rato vidus.

Deja, šiurkščių Raudonosios planetos uolienų laukai nebuvo palaima 1 tonos behemotui.
Pažiūrėkite į mūsų naują, išdidžiai mozaikingą vaizdą, kuriame vaizduojami šventieji „Curiosity“ ratai (aukščiau ir apačioje), užfiksuoti sausio 31 d. („Sol 529“), kuris yra nukreiptas į vidų ir aiškiai parodo 20 colių skersmens rato sužalojimo mastą.

Ratų apgadinimo laipsnis smarkiai padidėjo, kai važiavimo tempas per pastaruosius šešis mėnesius pagreitėjo tvirtoje, uolienų užpildytoje Marso vietovėje ir nuvažiavo daugiau nei 4,89 kilometro (3,04 mi.) Atstumo odometro nuo 2012 m. Rugpjūčio mėn.
Mega robotas dabar stovi prie kopos lauko krašto prie vaizdingo įėjimo, vadinamo „Dingo Gap“, 2014 m. Sausį nuvažiavęs dar 865 pėdas (264,7 metrus).
Palyginti naująjį „Sol 529“ vaizdą su mūsų neįtikėtinai mozaika iš „Sol 490“ 2013 m. Gruodžio mėn., Galite pamatyti padidėjusią žalą, patirtą dėl praėjusių mėnesių važiavimo automobiliu.

Tačiau kopų pjovimas per „Dingo Gap“ yra maždaug 3 metrų (1 metro) aukščio.
Pažvelkite į šią 3D dimensijos „Dingo Gap“ mozaiką iš NASA ir galėsite patys įvertinti komandos pasirinkimus.

Taigi komanda vertina, ar tai saugu įveikti, nes jie nenori įstrigti paslėptoje smėlio gaudyklėje, kaip antai, kuri, galų gale, paskatino Dvasią nugrimzti po kelerių metų.
„Sprendimas dar nepriimtas, tačiau protinga eiti pasitikrinti“, - NASA pranešime teigė Jimas Ericksonas iš NASA reaktyvinio varymo laboratorijos, Pasadena, Kalifornija, „Curiosity“ projekto vadovas.

„Mes apžvelgsime kopą į slėnį iškart į vakarus, kad pamatytume, ar reljefas atrodo toks geras, kaip rodo orbitos vaizdų analizė“, - pridūrė Ericksonas, remdamasis orbitos atvaizdais, kuriuos užfiksavo didelės raiškos vaizdavimo mokslo eksperimentas ( „HiRISE“) kamera ant NASA skriejančio Marso žvalgymo orbitos (MRO), skriejančio virš galvos.
Komanda taip pat išbando daugybę skirtingų vairavimo metodų, kad būtų sumažintas ratų pradūrimas, pavyzdžiui, važiavimas atgal arba naudojant tik keturis iš šešių ratų, kad būtų sumažinta ratų jėga, stumianti prieš nelygias uolas.
„Dingo atotrūkis“ galėtų pasiūlyti saugesnius vartus į „KMS-9“ keliaujant keliais į pietvakarius iki kvapą gniaužiančių Sharp kalno papėdžių.

„Dingo Gap“ yra tarp dviejų žemų skarelių ir yra siaurėjantis iš abiejų pusių į šiaurę ir pietus.
KMS-9 yra potencialiai turtingas mokslo objektas, kuriame komanda tikisi atlikti pirmąsias uolienų gręžimo operacijas po to, kai 2013 m. Liepos mėn. Išvyko iš Geltonakio įlankos kvadranto.
Kandidato gręžimo vieta yra tik maždaug už mylios (800 metrų) atstumo, nes Marso varna skrenda ir pasižymi mokslo komandai patrauklia geologija. Tačiau svarstomi maršrutai yra daug tolimesni.
„KMS-9 metu matome trijų tipų reljefus ir paviršius be dulkių“, - sakė mokslo komandos bendradarbė Katie Stack iš Kalifornijos Pasadena technologijos instituto.
„Smalsumas“ jau įvykdė savo pagrindinį tikslą - atrasti gyvenamąją zoną Marse, kuri galėtų palaikyti Marso mikrobus, jei jie kada nors egzistuotų.
NASA roveris „Curiosity“ atrado įrodymų, kad senovės Marso ežere buvo tinkamų cheminių ingredientų, įskaitant molio mineralus, kurie ilgą laiką galėjo išlaikyti mikrobų gyvybės formas, ir kad šios gyvenamosios sąlygos Raudonojoje planetoje išliko iki vėlesnės epochos, nei manyta anksčiau. .
Dėl to mokslo komanda nukreipė misijas į organinių molekulių - gyvybės, kaip mes ją žinome, - kurios gali būti išsaugotos Sharp kalno nuosėdinių uolienų sluoksniuose, paiešką.
„Iš tikrųjų tai, ką mes darome, yra pasukimas iš misijos, skirtos gyvenamosios aplinkos paieškai, į misiją, kuri dabar yra skirta to gyvenamosios aplinkos pogrupio, kuriame taip pat saugoma organinė anglis, paieškai“, - „Curiosity“ vyriausiasis tyrėjas Johnas Neseniai 2013 m. Gruodžio mėn. Vykusiame Amerikos geofizikos sąjungos (AGU) susitikime sakė Grotzingeris iš Kalifornijos Pasadena technologijos instituto.
Tuo tarpu NASA maršrutizatorius „Opportunity“ tyrinėja molio mineralų atodangus prie Solanderio viršūnės, esančios priešingoje Marso pusėje, jos antrosios dekados pradžioje tiriant Raudonųjų planetų slėpinius.
Perskaitykite mano naują istoriją apie 10 geriausių dešimtmečio dvasios ir galimybių atradimų - čia.
O pora naujų orbitų keliauja į Raudonąją planetą, kad sustiprintų Žemės invazijos laivyną - NASA MAVEN ir Indijos MOM.
Pagaliau naujasis Kinijos „Yutu“ mėnulio roveris žiemoja per antrąją Mėnulio naktį, kai laukiame jos likimo žodžio kitą savaitgalį, maždaug vasario 8 ar 9 dienomis.
Stebėkite čia besitęsiančias Keno naujienas „Curiosity“, „Opportunity“, „Chang’e-3“, „SpaceX“, „Orbital Sciences“, „LADEE“, „MAVEN“, „MOM“ ir „Mars“.