Jungtinė Amerikos ir Kanados inžinierių komanda žengė svarbų pirmąjį žingsnį į priekį sėkmingai pritaikydama naujus, pirmojo tipo robotų mokslinius tyrimus, atliktus Tarptautinėje kosminėje stotyje (ISS), kad galutinai suremontuotų ir papildytų orlaiviuose skriejančius kosminius palydovus. , ir kuris vieną dieną gali padėti sutaupyti milijardus dolerių vyriausybės ir komercinių kosminių sektorių sąnaudoms.
Linksmi abiejų tautų tyrinėtojai šaukė „Taip !!!“ - sėkmingai panaudojus Robotų degalų papildymo misijos (RRM) eksperimentą - užtaisytą už ISS ribų - kaip technologijos bandymo lovą, siekiant parodyti, kad nuotoliniu būdu valdomas robotas, esantis kosmoso vakuume, gali atlikti subtilias darbo užduotis, reikalaujančias ypač tikslaus judesio valdymo. Revoliucinis robotikos eksperimentas galėtų prailginti palydovų, esančių jau Žemės orbitoje, eksploatavimo laiką, kurie niekada net nebuvo skirti naudoti.
„Po daugelio mėnesių profesinio ir asmeninio laiko paskyrimo RRM man buvo didelis emocinis skubėjimas ir patikinimas pamatyti pirmąjį vaizdo įrašo srautą iš RRM įrankio“, - sakė Justinas Cassidy išskirtiniame išsamiame interviu „Space Magazine“. Cassidy yra RRM aparatūros vadovė NASA Goddard kosminių skrydžių centre Greenbelt mieste, Merilande.

O RRM komanda jau planuoja vykdyti dar ambicingesnius eksperimentus, kurie prasidės jau šią vasarą, įskaitant labai tikėtiną skysčių perkėlimą, kad būtų galima modeliuoti tikrąjį palydovo degalų papildymą, kuris galėtų pakeisti robotų programas kosmose - žiūrėkite išsamiau žemiau!
Visas roboto operacijas stotyje nuotoliniu būdu valdė skrydžių valdytojai. Nuotolinio valdymo ir robotikos tikslas yra išlaisvinti ISS žmonių įgulą, kad jie galėtų dirbti su kita svarbia veikla ir atlikti mokslinius eksperimentus, kuriems reikalinga žmogaus mintis ir įsikišimas vietoje.

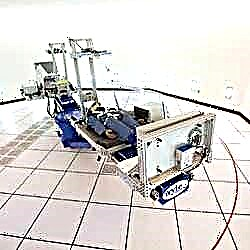
Per trijų dienų laikotarpį nuo kovo 7 iki 9 dienos inžinieriai atliko bendras operacijas tarp NASA robotinio degalų papildymo misijos (RRM) eksperimento ir Kanados kosmoso agentūros (CSA) roboto „amatininko“ - roboto „Dextre“. „Dextre“ oficialiai pramintas SPDM arba specialios paskirties „Dexterous Manipulator“.
Pirmąją dieną robotai Žemėje nuotoliniu būdu manevravo 12 pėdų (3,7 metro) ilgio „Dextre“ „meistru“ į RRM eksperimentą, naudodamiesi kosminės stoties Kanadoje pastatyta robotine ranka (SSRMS).
Dextre'o „ranka“ - techniškai žinoma kaip „OTCM“ - tada sugriebė ir patikrino tris skirtingus specializuotus palydovo darbo įrankius, esančius RRM bloke. Atlikus išsamius mechaninius ir elektrinius saugos dangtelio įrankio, vielinio pjaustytuvo ir antklodžių tvarkymo įrankio bei daugiafunkcio įrankio vertinimus nustatyta, kad visi trys įrankiai veikė nepriekaištingai.

„Mūsų komandos mechaniškai užfiksavo Kanados„ Dextre “roboto„ ranką “ant RRM saugos dangtelio įrankio (SCT). RRM SCT yra pirmasis orbitos vienetas, naudojantis „Dextre OTCM“ rankos vaizdo galimybes “, - aiškino Cassidy.
„Įrankio naudojimo pradžioje misijos kontrolieriai mechaniškai nukreipė OTCM elektrinę virkštelę į priekį, kad sujungtų ją su integruota SCT elektronikos dėže. Kai energija buvo pritaikyta šiai sąsajai, mūsų komanda sugebėjo tai pamatyti didžiuosiuose Goddardo ekranuose - SCT „pirmame šviesiame“ vaizdo įraše buvo rodomas įrankio kadras RRM laikymo vietoje (žr. Nuotrauką).

„Mūsų komanda pradėjo šaukti iš„ Taip! “ pagirti šį sėkmingą elektros funkcinės sistemos patikrinimą. “
Tuomet „Dextre“ atliko įvairias užduotis, kurių tikslas buvo ištirti, kaip gerai būtų galima manipuliuoti RRM modulio išorėje esančiomis reprezentacinėmis dujų jungtimis, vožtuvais, laidais ir sandarikliais. Jis išleido apsauginius paleidimo užraktus ir kruopščiai išpjovė du ypač plonus palydovo užrakto laidus - pagamintus iš plieno -, kurių skersmuo buvo vos 20 tūkstančių colių (0,5 milimetro).
„Vielos pjovimo įvykis truko vos kelias minutes. Bet abi vielos pjovimo užduotys užtruko maždaug 6 valandas suderintų, saugių robotų operacijų. Prieš skrydį užrakto laidas buvo nutiestas, susuktas ir surištas ant žemės ties aplinkos dangtelio ir „T-Valve“ jungtimis “, - sakė Cassidy.
Šis RRM pratybos yra pirmas kartas, kai „Dextre“ robotas buvo panaudotas ISS technologijos tyrimų ir plėtros projektui, o tai smarkiai išplėtė jo galimybes, išskyrus robotizuotą masyvios orbitos poslinkio priežiūrą.
Vaizdo įrašas: „Dextre“ robotų degalų papildymo misija: 2 diena. Antroji „Dextre“ reikliausių misijų diena sėkmingai įvykdyta 2012 m. Kovo 8 d., Kai robotikos rankininkas įvykdė tris paskirtas užduotis. Kreditas: NASA / CSA

Iš viso trys operacijų dienos užtruko apie 43 valandas ir vyko šiek tiek greičiau, nei tikėtasi, nes jos buvo tiek artimos nominaliai, kiek buvo galima tikėtis.
„1 ir 2 dienos vyko apie 18 valandų“, - žurnalui „Space Magazine“ sakė NASA Goddardo RRM operacijų vadovas / sistemų inžinierius Charlesas Baconas. „3 diena truko maždaug 7 valandas, nes visas užduotis atlikome anksti. Visas tris dienas bazinis laikas buvo 18 valandų, o komanda dirbo dviem pamainomis. Taigi laikas buvo toks, kokio tikėtasi, ir iš tikrųjų šiek tiek geresnis, nes baigėme anksti paskutinę dieną. “

„Per pastaruosius kelis mėnesius mūsų komanda rengiasi rengti RRM demonstracijas orbitoje“, - pasakojo Cassidy. „Kaip ir teatro spektaklis, užkulisiuose turime daug inžinierių, kurie teikė paramą plėtrai ir toliau tebėra RRM operacijų orbitoje dalis“.
„Kiekviename RRM etape - pradedant paruošimu, pristatymu, montavimu ir dabar atliekant operacijas - mane stebina didžiulės pastangos, kurias prisidėjo daugybė įvairių komandų, kad RRM įvyktų. Palydovinių paslaugų tarnyba NASA Goddardo kosminių skrydžių centre kartu su Johnsono kosmoso centru, Kenedžio kosminiu centru (KSC), Maršalo kosminių skrydžių centru ir Kanados kosmoso agentūros valdymo centru Sent Huberte, Kvebeke, padarė RRM realybe. “
„Iki šiol sėkmingai atliktos RRM operacijos Tarptautinėje kosminėje stotyje (ISS) naudojant„ Dextre “yra daugelio NASA organizacijų ir partnerių meistriškumo įrodymas“, - aiškino Cassidy.
Trijų dienų „Dujų jungiamųjų detalių šalinimo užduotis“ buvo pradinis modeliavimo būdas, būtinas robotams pritvirtinant netinkamai veikiančius palydovus ir degalų papildymą dezinfekuojant kitaip oficialiai eksploatuojamus palydovus, kad tikimės pratęsti jų eksploatavimo laiką kelerius metus.
Antžeminės technikos specialistai naudoja jungiamąsias detales ir vožtuvus, kad visus būtiniausius skysčius, dujas ir degalus prieš paleidimą įpiltų į palydovų saugojimo rezervuarus ir kurie po to uždaromi, uždengiami ir į juos niekada nebeįmanoma patekti.
„Negalime pervertinti kosminės stoties, kaip naudingos technologijos bandomosios patalpos, poveikio“, - sako Frankas Cepollina, NASA Goddardo kosminių skrydžių centro Greenbelt mieste, Md, palydovų aptarnavimo galimybių tarnybos (SSCO) asocijuotasis direktorius.
„Šviežios palydovų aptarnavimo technologijos realioje kosmoso aplinkoje bus demonstruojamos per kelis mėnesius, o ne metus. Tai yra didžiulė. Tai rodo realią pažangą tobulinant kosmoso technologijas “.
Dar keturi būsimi šių metų RRM eksperimentai, preliminariai nustatyti šiems metams, parodys nuotoliniu būdu valdomo roboto galimybes pašalinti kliūtis ir užpildyti tuščias palydovinės dujų talpyklas kosmose, taip sutaupant brangią techninę įrangą nuo per ankstyvo prisijungimo prie orbitinės šiukšlių aikštelės.
Ateities RRM operacijų vykdymo laikas gali būti sudėtingas ir priklauso nuo to, ar yra „Dextre“ ir SSRMS sistemos, kurios taip pat yra labai rezervuotos daugeliui kitų vykstančių ISS operacijų, tokių kaip kosminiai takai, priežiūros veikla ir mokslo eksperimentai, taip pat nuolatinio kranto švartavimas ir (arba) iškrovimas. srautas kritinių krovinių atsargų atsargų, tokių kaip „Progress“, ATV, HTV, „Dragon“ ir „Cygnus“.
Lankstumas yra visų ISS operacijų pagrindas. Ir nors stoties įgula nėra susijusi su RRM, jų veikla gali būti.
„Nors pati įgula savo operacijose nesiremia„ Dextre “,„ Dextre “operacijos gali netiesiogiai paveikti tai, ką įgula gali ar negali padaryti“, - pasakojo man Baconas. "Pavyzdžiui, atliekant RRM operacijas ekipažas negali atlikti tam tikrų fizinių pratimų dėl to, kaip tas judesys galėjo paveikti Dextre'o judesius."
Čia yra sąrašas būsimų RRM operacijų - laukiantys ISS tvarkaraščio apribojimai:
* Degalų papildymas (2012 m. Vasara). Po to, kai „Dextre“ atidarys degalų vožtuvą, panašų į tą, kuris šiandien dažniausiai naudojamas palydovuose, jis perpils į jį skystą etanolį per modernią robotizuotą degalų tiekimo žarną.
* Manipuliavimas terminiu antklodžiu (TBD 2012) - „Dextre“ atliks šiluminės antklodės juostos nupjovimą ir šiluminės antklodės sulankstymą, kad būtų atskleistas turinys.
* Varžtų (tvirtinimo detalių) pašalinimas (TBD 2012) - „Dextre“ robotiškai atsukite palydovo varžtus (tvirtinimo detales).
* Elektrinis dangtelio pašalinimas (TBD, 2012 m.) - „Dextre“ nuims dangtelius, kurie paprastai uždengtų palydovo elektrinį lizdą.
RRM buvo perkelta į orbitą „Space Shuttle Atlantis“ krovinių skyriaus viduje per 2011 m. Liepos mėn. Vykdant NASA trijų dešimtmečių ilgio šaudyklų programos paskutinę šaudyklinę misiją (STS-135), o kosminiais kosmonautai ją sumontavo ant išorinės darbo platformos ant ISS stuburo santvaros. Projektas yra bendros NASA ir CSA pastangos.
„Štai kas yra sėkmė. Naudodamiesi RRM, mes tikrai atveriame kelią būsimiems robotų tyrinėjimams ir palydovų aptarnavimui “, - baigė Cassidy.

…….
Kovo 24 d. (Šeštadienis): nemokama Keno Kremerio paskaita Naujojo Džersio astronomijos asociacijoje, Voorhees State Park, NJ, 2030 val. Tema: „Atlantis“, „America's Shuttle“ programos pabaiga, RRM, „Orion“, „SpaceX“, CST-100 ir NASA ateitis iš žmogaus ir robotų kosminio skrydžio