„Woods Hole“ okeanografijos įstaiga (WHOI) sako, kad jų povandeninis robotas ką tik baigė pirmąją automatizuotą povandeninių mėginių ėmimo operaciją. Robotas vadinosi Nereid Under Ice (NEI) ir mėginį jis rinko Graikijoje. WHOI kuria Nereid kartu su NASA Planetary Science and Technology from Analog Research (PSTAR) programa.
NUI yra šiek tiek mažesnis nei išmanusis automobilis ir sveria apie 1800 kg (3960 svarų). Čia jis atlieka svarbų mokslinį darbą čia, Žemėje. Praėjusio mėnesio misijos metu jis rinko mėginį iš Kolombo ugnikalnio, aktyvaus povandeninio ugnikalnio, esančio netoli Graikijos Santorinio salos. Dalis kraterio grindų yra hidroterminių angų laukas, padengtas storu bakterijų kilimėliu. Surinktas NUI mėginys bus naudojamas mikrobų gyvenimui tirti.
„Vienas iš mūsų tikslų buvo išmesti vairasvirtę, ir mes sugebėjome tai padaryti.“
Rich Camilli, WHOI asocijuotasis mokslininkas, automatikos technologijų plėtros vadovas
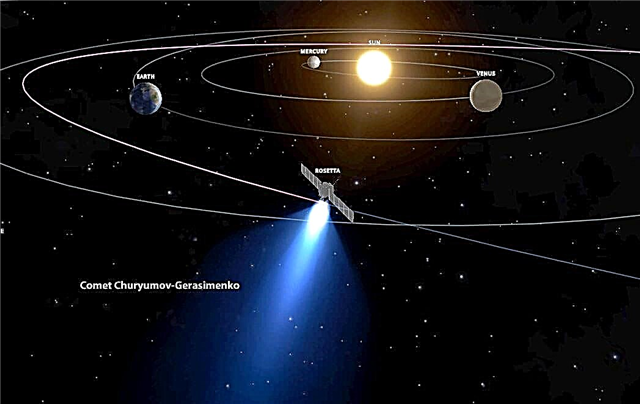
NUI plėtra kyla iš būsimų misijų poreikio kai kuriems Saulės sistemos mėnuliams, tokiems kaip Europa ir Ganymede, turintiems požeminius vandenynus. Norint ištirti tuos pasaulius, reikės naujo tipo robotų, galinčių veikti autonomiškai po vandeniu, o ne klaidžioti po paviršių.
Rich Camilli yra WHOI asocijuotasis mokslininkas, vadovaujantis automatikos technologijos plėtojimui kaip NASA Planetary Science and Technology iš Analoginių tyrimų (PSTAR) tarpdisciplininių tyrimų programos dalis. Pranešime spaudai Camilli teigė: „Transporto priemonei imti pavyzdį be piloto vairavimo buvo didžiulis žingsnis į priekį. Vienas iš mūsų tikslų buvo išmesti vairasvirtę, ir mes sugebėjome tai padaryti. “

Atsiradę savarankiškai važiuojantys automobiliai, mes pripratome prie automatinių transporto priemonių idėjos. Tačiau povandeninė aplinka yra daug kitokia ir daug pavojingesnė nei asfaltuotas paviršiaus kelias. Sukurti pakankamai tvirtą dirbtinį intelektą toje aplinkoje yra iššūkis. Camilli buvo dalis tarptautinės tyrėjų komandos, tiriančios gyvenimą Kolombo mieste, atšiaurioje cheminių medžiagų aplinkoje. Tačiau Camilli taip pat ten norėjo sužinoti daugiau apie tai, kaip autonominiai robotai gali tyrinėti povandeninę aplinką.
Į NUI dirbtinį intelektą įeina programinės įrangos planavimo priemonė, vadinama „Spock“. Spock leidžia NUI ne tik savarankiškai imti mėginius, bet ir pasirinkti geriausias tų mėginių vietas. Tolimame Mėnulyje, požeminiame vandenyne, reikės tokio tipo sudėtingų pažangių AI.
„Jei turėsime tokią didelę viziją siųsti robotus į tokias vietas kaip Europa ir Enceladus, jiems galiausiai reikės dirbti savarankiškai ir be piloto pagalbos“.
Gideonas Billingsas, Mičigano universitetas
Gideonas Billingsas yra kviestinis studentas iš Mičigano universiteto, kurio baigiamasis darbas yra skirtas automatinėms technologijoms. „Billings“ kodas buvo naudojamas rinkti šiam pirmam mėginiui. Jis išleido vieną komandą NUI autonominiam manipuliatoriui, o NUI atliko likusią dalį. Per kelias akimirkas NUI išplėtė savo roboto ranką ir panaudojo slurp-žarnos mėginių ėmiklį medžiagai išsiurbti.
Billingsas supranta, kad bet kokiai misijai, kaip tirti tokių mėnulių, kaip Europa, požeminius vandenynus, prireiks ypač pažangių, specifinių technologijų, įskaitant sudėtingas AI. „Jei turėsime tokią didelę viziją išsiųsti robotus į tokias vietas kaip Europa ir Enceladus [atitinkamai Jupiterio ir Saturno mėnuliai], jiems galiausiai reikės dirbti savarankiškai, kaip be, ir be piloto pagalbos“, - sako jis.

Radijo signalas gali pasiekti 35 minutes, kol Jupiteris pasiekia žemę, todėl susisiekimas pirmyn ir atgal užtruks daugiau nei valandą. Labai svarbu, kad žvalgymo robotai tam tikrą laiką galėtų „galvoti“ patys, atlikdami užduotis ir išvengdami pavojų. Kad pasiektų tuos tikslus, Billingsas ir kiti toliau dirbs AI. Jų tikslas yra „išmokyti“ robotus, kad jie galėtų pamatyti panašius į ROV (nuotoliniu būdu valdomų transporto priemonių) pilotus su „žvilgsnio stebėjimo“ technologija. Jie taip pat nori sukurti tvirtą žmogaus ir mašinos sąsajos kalbą, kad mokslininkai galėtų kalbėti tiesiogiai su robotu transporto priemonei, nereikia piloto, kuris verstų komandas.
Vizija yra tokia ROV, kaip Nereid Under Ice, grupė dirbti kartu.
„Galų gale galime pamatyti pažintinių vandenynų robotų tinklą, kuriame yra bendra žvalgyba, apimanti visą laivyną, kai kiekviena transporto priemonė bendradarbiauja kaip bitės avilyje“, - sako Camilli. „Tai bus daug daugiau, nei prarasti kreiptuką“.
NUI keletą metų buvo kuriama. Jis buvo išbandytas Arktyje, kur keliavo po ledu ir rinko duomenis apie atšilimo regioną. NUI galėjo keliauti toliau po ledu nei bet kuri ankstesnė transporto priemonė.
NUI gali nuvažiuoti iki 40 km (25 mylių) į šoną po vandeniu, daug toliau nei keli šimtai pėdų, būdingų kitiems ROV. Prijungtas plonu optinio pluošto kabeliu, jis gali perduoti aukštos raiškos vaizdo įrašą atgal į savo pagrindinį laivą. Jis turi pilną garso, cheminių ir biologinių jutiklių komplektą bei septynių funkcijų manipuliatoriaus ranką. Jis gali nardyti iki 2000 metrų gylio (6500 pėdų)
Daugiau:
- Pranešimas spaudai: WHOI povandeninis robotas paima pirmąjį žinomą automatizuotą mėginį iš vandenyno
- WHOI: HROVNereid po ledu
- Žurnalas „Space“: Vandens motociklininkas važiuoja ant ledo paviršiaus Antarktidoje