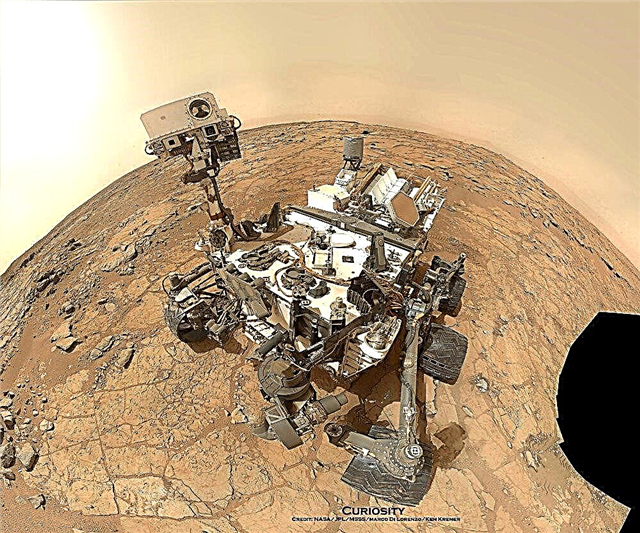
„CAPE CANAVERAL“, FL - NASA automobilių „Curiosity Mars“ maršrutizatorius atnaujino visas mokslo operacijas ir važiavo po šešių dienų trukmės tyrimų nutraukti dėl nerimo dėl elektros energijos sistemos gedimo, kuris dabar išspręstas.
Lapkričio 17 d. Inžinieriai pastebėjo „Curiosity“ įtampos svyravimą, dėl kurio robotai prižiūrėtojai nutraukė mokslinę veiklą ir važiavo į paslaptingąjį Sharp kalną link ieškodami pagrindinės elektros problemos priežasties.
NASA sako, kad įtampos pokytis nepadarė įtakos vairuojančiųjų saugai ar sveikatai, todėl tyrinėdama situaciją iš milijonų mylių nuo Žemės paviršiaus, komanda elgėsi labai atsargiai.
„Transporto priemonės elektrinė sistema turi„ plaukiojančio autobuso “konstrukcijos funkciją, leidžiančią toleruoti įvairius įtampos skirtumus tarp transporto priemonės važiuoklės - jos mechaninio rėmo - ir 32 voltų elektros linijų, tiekiančių elektrą per visą roverį. Tai apsaugo roverį nuo elektrinių šortų “, - sakoma NASA pranešime.
„Curiosity“ įtampos lygis nuo nusileidimo dienos buvo apie 11 voltų, o lapkričio 17 d. Jis sumažėjo iki maždaug 4 voltų. Elektros energijos problema roveriui nepadėjo patekti į saugaus režimo būseną.

Inžinieriai sudarė galimų įtampos pokyčių priežasčių sąrašą, sustabdydami mokslo darbus ir keliaudami per Marso kraterio grindis, kur „Curiosity“ nusileido beveik prieš pusantrų metų, 2012 m. Rugpjūtį.
„Mes sudarėme galimų priežasčių sąrašą ir tada nusprendėme, kuriuos sąrašus galime po vieną išbraukti“, - sakė „Rover“ elektrotechnikas Robas Zimmermanas iš NASA reaktyvinio varymo laboratorijos, Pasadena, Kalifornija.
NASA sako, kad tikėtina priežastis yra vidinis trumpas, kilęs iš radioizotopo termoelektrinio generatoriaus (RTG) - „Rovers“ branduolinio energijos šaltinio.
RTG dažniausiai buvo naudojami daugelyje NASA misijų, kurios taip pat patiria retkarčiais šortus ir kurių skrydžiai neturėjo ilgalaikio poveikio ar prarado galimybes.
„Šis trumpalaikis trumpas tipas buvo pastebėtas panašiose RTG, tarp jų ir„ Cassini “erdvėlaivyje, kuris daugelį metų riedėjo Saturnu. „Rover“ elektronika yra sukurta veikti esant kintamai maitinimo įtampai, todėl tai nėra pagrindinė problema “, - naujienoje apie misiją sako„ Curiosity “komandos narys Kenas Herkenhoffas iš USGS.
Iki lapkričio 23 d., Kai komanda nusprendė atnaujinti mokslo operacijas, įtampos lygis buvo normalus - 11 voltų.
Taigi įmanoma, kad ateityje gali pasikartoti tas pats protarpinis įtampos pokytis.
Tuo tarpu roveris atnaujino savo kelionę po Sharp kalną ir tikimasi, kad jis atvyks į kalno pagrindą kažkada 2014 m. Viduryje.

Praėjusį savaitgalį robotas pristatė papildomas miltelių pavidalo uolienų porcijas „CheMin“ ir „SAM“ laboratorijoms roverio viduje. Mėginys buvo surinktas prieš 6 mėnesius po gręžimo į uolą, pravarde „Cumberland“, ir papildys ankstesnius matavimus.
Smalsumas jau įvykdė savo pagrindinį mokslo tikslą - savo nusileidimo vietoje aptikti gyvenamąją zoną.
Mokslininkai tikisi išplėsti Marso apgyvendinimo regioną, kai 1 tonos robotas pradės kilti nuo Sharp kalno, kad ištirtų nuosėdinius sluoksnius 3 mylių (5 km) aukščio kalno žemupyje, kuriuose užfiksuota Marso geologinė ir klimato istorija per tam tikrą laiką. laikotarpis milijardai metų.

Ir kadangi abu NASA rodai „Curiosity“ ir „Opportunity“ pakilo į Marso kalnus, kitą 2014 m. Rugsėjį juos sujungs nauja Marso orbitų poros iš JAV ir Indijos - MAVEN ir MOM -, kurios žymiai padidins Žemės invazijos jėgą Raudonojoje planetoje.
Stebėkite čia tęstines „Mars rover“, MOM ir MAVEN naujienas bei Ken'o MAVEN ir „SpaceX Falcon 9“ pranešimus iš vietos Kennedy kosmoso centro spaudos centre ir Cape Canaveral oro pajėgų stotyje Floridoje.