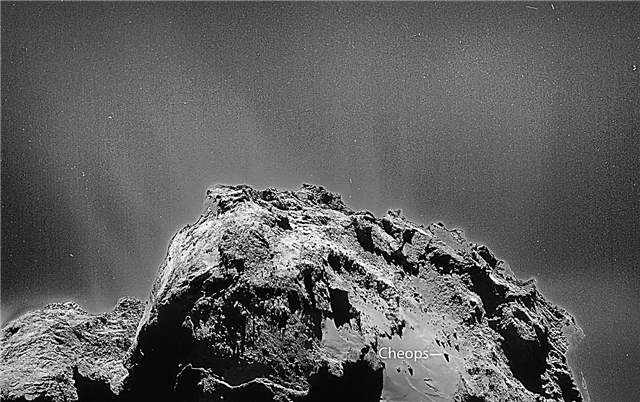
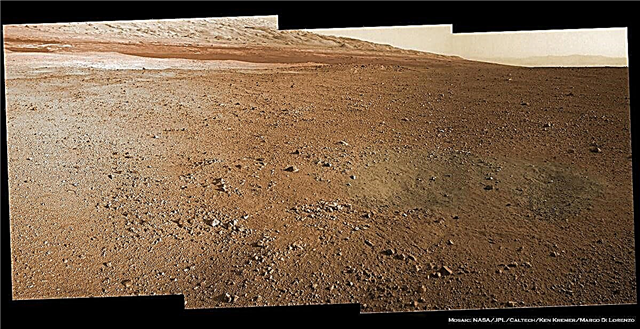
Vaizdo antraštė: „Sharios“ kalno mozaika „Curiosity“ Gale kraterio nusileidimo vietoje. Gale'o krateris miglotu atstumu. Ši mozaika buvo susiūta iš trijų pilnos raiškos „Navcam“ vaizdų, kuriuos „Curiosity“ grąžino „Sol 2“ (rugpjūčio 8 d.) Ir nuspalvino „Mastcam“ atvaizdais iš 34 milimetrų fotoaparato. Apdorojimą atliko Kenas Kremeris ir Marco Di Lorenzo. Kreditas: NASA / JPL-Caltech / Kenas Kremeris / Marco Di Lorenzo
„Curiosity“ maršrutizatorius sugrąžino pirmuosius išsamius „Sharp“ kalno vaizdus, pateikdamas stulbinamą pradinį vairavimo tikslo vaizdą ir dabar yra svarbiausio „smegenų transplantacijos“ viduryje šį savaitgalį, kuris pavers ją visiškai veikiančiu roveriu.
Mokslo komanda nurodys šešiaratį „Curiosity“ pradėti lipti į Sharp kalną vėliau, per pagrindinę roverių dvejų metų misiją, pravažiavusi ir išsamiai ištyrusi jos nusileidimo vietos grindis Gale krateryje.
Peržiūrėkite mūsų mozaiką, sutelkdami dėmesį į „Mount Sharp“ pagrindą, naudodami tris pilnos raiškos vaizdus, kuriuos užfiksuoja „Navcam“ navigacijos kamera, esanti ant naujai pastatyto fotoaparato, ir instrumento stiebas su spalvinimu, paremtu 34 milimetrų „Mastcam“ spalvota kamera.
Smalsumas atslūgo beveik lygus ant Marso paviršiaus, tačiau šiek tiek pasviręs 3 laipsnių kampu į priekį, o vaizdai iki šiol daromi iš to iš anksto užprogramuoto požiūrio taško, maždaug maždaug už šešių mylių nuo Sharp kalno pagrindo.
Mokslininkas mano, kad vietovė užlieta mažais akmenukais, kurie gali kilti iš netoliese esančio aliuvinio ventiliatoriaus, pro kurį seniai tekėjo skystas vanduo. Orbitos stebėjimai su NASA „Mars Reconnaissance Orbiter“ nustatė molio ir sulfato mineralus apatiniuose Sharp kalno sluoksniuose, tai rodo šlapią istoriją. Aukštesniame aukštyje mokslininkai tikisi rasti ribinį sluoksnį ir nuorodas, kas lėmė „didįjį išsekimo įvykį“ ir skysto vandens netekimą ant senovės Marso paviršiaus.
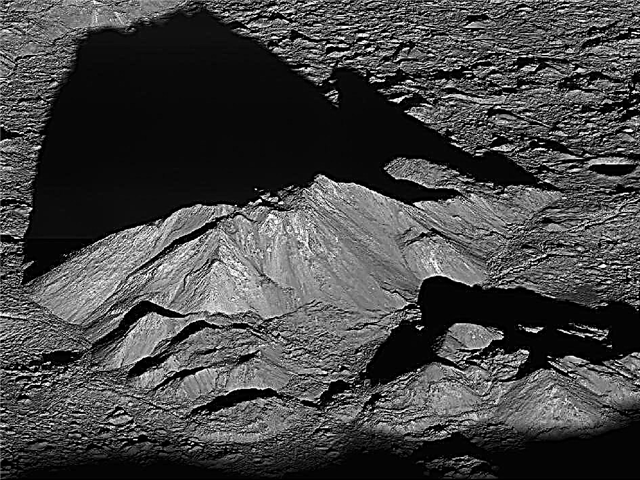
Šį savaitgalį „Curiosity“ taip pat pradėjo perduoti įspūdingus „hi res Mastcam“ vaizdus, kurie žymiai viršys bet ką iki šiol. Čia yra „Mastcam 360“ panorama, kurią iki šiol surinko NASA:

Vaizdo antraštė: pirmoji „Curiosity“ „Mastcam“ vaizdų „aukštos raiškos“ spalvų mozaika. NASA / JPL-Caltech / MSSS
Bet prieš tai, kai robotas gali iš tikrųjų važiuoti, pasiekite savo 7 pėdų (2 metrų) ilgio ranką su prietaisu ir nuskaitykite mėginius, kad būtų galima atlikti analizę laivo chemijos laboratorijoje, kad jai būtų reikalinga programinė įranga, kad galėtų atlikti mokslo užduotis.
Įgyvendinę visus pradinius tikslus po nusileidimo, NASA „Jet Propulsion Lab“, Kalifornijoje, Pasadena, inžinieriai praleidžia 4 Sols arba Marso dienas, šį savaitgalį ruošdamiesi įkelti naują programinės įrangos paketą pavadinimu „R10“, optimizuotą paviršiaus operacijoms ir pakeis dabartinį „R9“ paketą.
„Mes nuo pat pradžių suplanavome misiją, kad galėtume atnaujinti programinę įrangą, reikalingą skirtingiems misijos etapams“, - sakė Benas Cichy iš NASA reaktyvinio varymo laboratorijos Pasadena (Kalifornija), vyriausiasis programinės įrangos inžinierius Marso mokslo laboratorijos misijai. „Skrydžio programinės įrangos versija, kurią šiuo metu naudoja„ Curiosity “[R9], iš tikrųjų buvo nukreipta į transporto priemonės nusileidimą. Tai apima daugybę galimybių, kurių mums nebereikia. Tai suteikia mums pagrindines galimybes valdyti roverį ant paviršiaus, tačiau mes planavome visą laiką po nusileidimo pereiti į skrydžio programinės įrangos versiją, kuri yra tikrai optimizuota antžeminėms operacijoms. “
Programinė įranga tiek pagrindiniame, tiek atsarginiame kompiuteryje yra kruopščiai tobulinama žingsnis po žingsnio. Jis sakė, kad pirmasis žingsnis penktadienį, norint išbandyti atnaujinimą, buvo pirštas.
„R10 yra optimizuotas paviršiaus operacijoms ir turi tai, ko nori mokslo komanda. Jis atsisiųstas per kitus keturis būrius, kad būtų galima įgyvendinti šią fantastišką misiją “, - sakė Cichy rugpjūčio 10 d. Vykusiame JPL žinių pranešime. Instaliacijos metu jie atsidurs mokslui kitoms keturioms Sols grupėms.
„Šiuo metu pagrindinėje programinėje įrangoje yra galimybė patikrinti prietaisų būklę, tačiau mes nelabai turime galimybių visapusiškai panaudoti visą šią puikią aparatūrą, kurią išsiuntėme į Marsą.“
„Taigi„ R10 “programinė įranga suteikia mums galimybę iki galo panaudoti robotinę ranką, grąžtą, dulkių pašalinimo įrankį, visą mėginių ėmimo grandinę, pagražinti pavyzdžius ir juos išanalizuoti - visa tai bus įdomi ši misija. . “
„Smalsumas yra Marso megaverslas, gimęs vairuoti! „R10“ suteikia mums galimybę vairuoti autonomiškai ir naudoti vaizdus norint aptikti pavojus ir saugiai vairuoti. “
Kol kas programinės įrangos atnaujinimas vyksta kaip planuota šį savaitgalį.
„Curiosity“ padarė precedento neturintį tikslų nusileidimą Gale kraterio viduje rugpjūčio 5–6 dienomis, naudodamasi raketa varomu „Sky Crane“ nusileidimo etapu, kuris kabeliais „Curiosity“ nuleido į Raudonosios planetos paviršių tiksliai taip, kaip buvo planuota lygumoje, esančioje astride Mount Sharp, vos už kelių mylių nuo gigantiško kalno bazė.
Sharp kalnas užima didžiąją dalį 96 mylių pločio (154 km) Gale kraterio interjero. 3,4 mylios (5,5 km) aukščio sluoksniuoto kalno viršūnė yra aukštesnė nei Whitney kalnas Kalifornijoje.
Palyginimui, žiūrėkite „Curiosity“ pradinius platesnius lauko vaizdus po nusileidimo 2–3 ir 3 D kalnuose iš nusileidimo iš žemesnės skiriamosios gebos „Hazcam“ fotoaparatų.
NASA 1 tonos tūris megaverslas „Curiosity“ yra didžiausias ir sudėtingiausias kada nors į kitos planetos paviršių išsiųstas robotas, sportuojantis 10 moderniausių mokslo prietaisų, kurių svoris yra 15 kartų didesnis nei bet kurios ankstesnės važiuojančios transporto priemonės. „Smalsumo“ tikslas yra nustatyti, ar Marsas kada nors galėjo palaikyti mikrobų gyvybę, buvusį ar dabartį, ir ieškoti gyvybės ženklų organinių molekulių pavidalu.