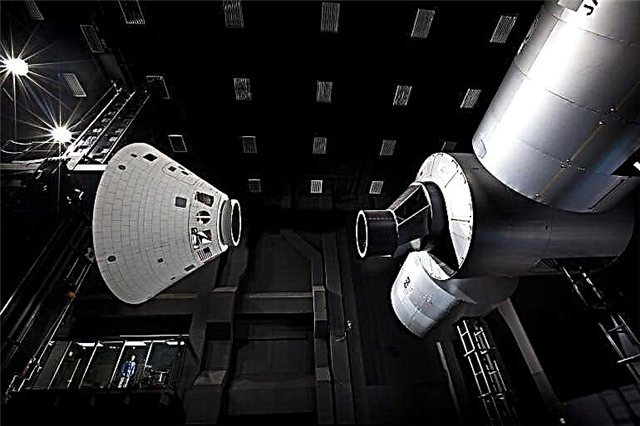
Planetiniai „MicroBots“. Atvaizdo kreditas: NASA Padidinti
Interviu su Penny Boston, I dalis
Jei norite keliauti į tolimas žvaigždes ar rasti gyvenimą kitame pasaulyje, reikia šiek tiek planuoti. Štai kodėl NASA įsteigė NIAC, NASA pažangiųjų koncepcijų institutą. Pastaruosius kelerius metus NASA mokslininkus ir inžinierius skatino mąstyti ne tik lauke, bet ir pateikti idėjas tik apie šią mokslinės fantastikos pusę. Jie tikisi, kad kai kurios iš šių idėjų bus įgyvendintos ir pateiks agentūrai technologijas, kuriomis ji galės naudotis per 20, 30 ar 40 metų.
NIAC teikia finansavimą konkurencijos pagrindu. Iš nedaugelio pateiktų pasiūlymų finansuojama tik saujelė. I etapo finansavimas yra minimalus, jo pakanka, kad tyrėjai galėtų įgyvendinti savo idėją popieriuje. Jei idėja parodo nuopelną, ji gali gauti II etapo finansavimą, leidžiančią tęsti tyrimus nuo grynos idėjos iki neapdoroto prototipo etapo.
Vienas iš projektų, kuriam šiais metais buvo skirtas II etapo finansavimas, buvo daktaro Penelope Boston ir dr. Steveno Dubowsky bendradarbiavimas, siekiant sukurti „šokinėjančius mikrobotus“, galinčius ištirti pavojingą reljefą, įskaitant požeminius urvus. Jei projektas nebenaudojamas, šokinėjantys mikrobotai gali būti siunčiami gyvybės paieškai po Marso paviršiumi.
Bostonas praleidžia daug laiko olose, tyrinėdamas ten gyvenančius mikroorganizmus. Ji yra urvų ir karstų studijų programos vadovė ir „New Mexico Tech“ Socorro mieste, Naujojoje Meksikoje, docentė. Dubowsky yra MIT lauko ir kosminės robotikos laboratorijos, esančios MIT, Kembridže, Masačusetso valstijoje, direktorius. Iš dalies jis žinomas dėl dirbtinių raumenų tyrimų.
Žurnalas „Astrobiology“ apklausė Bostoną netrukus po to, kai ji ir Dubowsky gavo II fazės NIAC stipendiją. Tai pirmasis iš dviejų dalių interviu. Astrobiologijos žurnalas (AM): Jūs ir daktaras Stevenas Dubowsky neseniai gavote NIAC finansavimą darbui su miniatiūrinių robotų idėja tyrinėti požeminius urvus Marse? Kaip atsirado šis projektas?
Penny Boston (PB): Mes atlikome gana daug darbų urvuose Žemėje, norėdami pažvelgti į šių unikalių aplinkų mikrobų gyventojus. Mes manome, kad jie gali tarnauti kaip šablonai ieškant gyvybės formų Marse ir kituose nežemiškuose kūnuose. 1992 m. Kartu su Chrisu McKay ir Michaelu Ivanovu paskelbiau dokumentą, kuriame teigiama, kad Marso požemis bus paskutinis gyvybės prieglobstis toje planetoje, nes per geologinį laiką jis tapo šaltesnis ir sausesnis. Tai privertė mus pažvelgti į žemės paviršiaus požemius. Kai tai padarėme, mes sužinojome, kad yra nuostabi daugybė organizmų, kurie, atrodo, yra vietiniai požeminiai augalai. Jie sąveikauja su mineralogija ir gamina unikalius bioparašus. Taigi mums tai tapo labai derlinga sritis.
Patekti į sunkius urvus net šioje planetoje nėra taip paprasta. Norint tai išversti į robotines nežemiškas misijas, reikia šiek tiek pagalvoti. Turime gerus vaizdavimo iš Marso duomenis, rodančius aiškius bent lavos vamzdžių urvų geomorfologinius įrodymus. Taigi mes žinome, kad Marsas turi bent vieną tokio tipo urvą, kuris galėtų būti naudingas mokslinis taikinys būsimoms misijoms. Galima manyti, kad yra ir kitų urvų tipų, ir būsimame Amerikos geologijos draugijos specialiajame leidinyje turime spaudos leidinį, kuriame nagrinėjami unikalūs urvų formavimo (speleogenetiniai) mechanizmai Marse. Svarbus dalykas yra tai, kaip apvažiuoti tokį griežtą ir sudėtingą reljefą.
AM: Ar galite apibūdinti tai, ką nuveikėte pirmame projekto etape?
PB: I etape norėjome sutelkti dėmesį į robotus, kurie yra nedideli, labai gausūs (taigi brangūs), didžiąja dalimi autonominiai ir turintys mobilumą, reikalingą norint patekti į nelygią reljefą. Remdamiesi nuolatiniu dr. Dubowsky darbu su dirbtiniais raumenimis suaktyvintu robotų judesiu, mes sugalvojome daugybę daugybės mažyčių sferų, apie teniso kamuoliukų dydį, kurie iš esmės šokinėja, beveik kaip meksikietiškos šokinėjančios pupelės. Jie kaupia raumenų energiją, taip sakant, ir paskui save virpina įvairiomis kryptimis. Štai kaip jie juda.
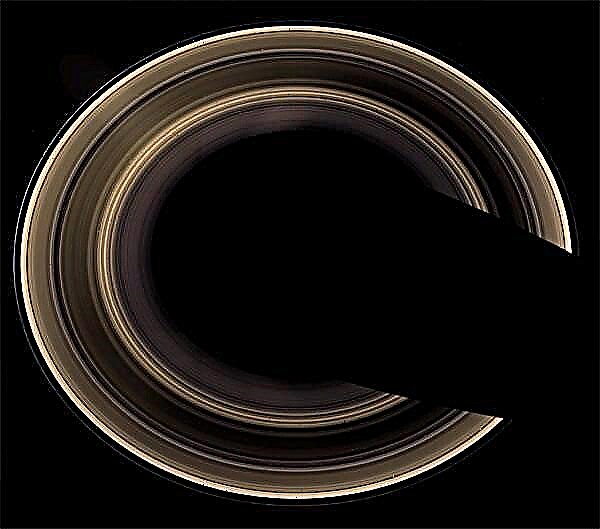
kreditas: Pateikė R.D.Gusas Frederickas
Didelio masto planetinio paviršiaus ir požeminio žemės paviršiaus planavimo nustatymas. Norėdami padidinti, spustelėkite paveikslėlį.
Vaizdo kreditas: Pateikė R.D.Gusas Frederickas
Apskaičiavome, kad greičiausiai galėtume supakuoti apie tūkstantį šių vaikinų į naudingo krovinio masę, kurios dydis yra vienas iš dabartinių MER (Mars Exploration Rovers). Tai suteiktų mums lankstumo pamesti didelę procentinę dalį vienetų ir vis dar turėtų tinklą, kuris galėtų atlikti rekonstravimą ir stebėjimą, vaizdavimą ir galbūt net kai kurias kitas mokslo funkcijas.
AM: Kaip visos šios mažos sferos dera tarpusavyje?
PB: Jie elgiasi kaip spiečius. Jie susieja vienas su kitu naudodamiesi labai paprastomis taisyklėmis, tačiau tai suteikia daug lankstumo jų kolektyviniame elgesyje, leidžiantį patenkinti nenuspėjamo ir pavojingo reljefo reikalavimus. Galutinis produktas, kurį mes įsivaizduojame, yra šių mažų vaikinų parkas, kuris siunčiamas į perspektyvią nusileidimo vietą, išplaukia iš tūpimo vietos ir perkelia į kažkokį požeminį ar kitą pavojingą reljefą, kur jie save naudoja kaip tinklą. Jie sukuria korinio ryšio tinklą „nuo vieno iki kito“ pagrindu.
AM: Ar jie sugeba kontroliuoti, kuria kryptimi jie šokinėja?
PB: Mes siekiame, kad jie galų gale būtų labai pajėgūs. Pereidami į II etapą, mes dirbame su Fritzu Printzu Stanforde dėl ultra miniatiūrinių kuro elementų, kad galėtume maitinti šiuos mažus vyrukus, kurie jiems suteiktų galimybę atlikti gana sudėtingą įvairių dalykų rinkinį. Viena iš tų galimybių yra kontroliuoti, kuria kryptimi jie eina. Yra tam tikri būdai, kuriais remiantis jie gali būti statomi, kad jie galėtų pirmyn eiti viena ar kita kryptimi. Tai nėra taip tiksliai, kaip būtų, jei jie būtų ratiniai roveriai, einantys tik tiesiu keliu. Bet jie gali labiau nusiteikti daugiau ar mažiau norima linkme. Taigi mes manome, kad jie bent jau grubiai valdys kryptį. Tačiau didelę reikšmę turi jų spiečiaus judėjimas kaip besiplečiantis debesis.
Kad ir kokie nuostabūs yra „MER“ roveriai, man reikalingas kažkas daugiau, panašus į vabzdžių robotų idėją, kurią inicijavo Rodney Brooksas MIT. Galimybė įsijausti į vabzdžių intelekto ir pritaikymo tyrimams modelį jau seniai kreipėsi į mane. Pridėjus tai prie unikalaus mobilumo, kurį teikia dr. Dubowsky's šuoliuojanti idėja, manau, kad šie procentai mažų vienetų gali išgyventi požeminio reljefo pavojus - tai man atrodė tiesiog stebuklingas derinys.
HB: Taigi ar I etape buvo pastatytas kuris nors iš šių objektų?
PB: Ne. I fazė kartu su NIAC yra šešis mėnesius trunkantis smegenų įtempimo ir pieštuko stūmimo tyrimas, siekiant išsiaiškinti šiuolaikinių technologijų pažangą. II etape per dvejus metus atliksime ribotą kiekį prototipų ir lauko bandymų. Tai yra daug mažiau nei to, ko gali prireikti realiai misijai. Bet, be abejo, tai yra NIAC mandatas išnagrinėti technologijas nuo 10 iki 40 metų. Mes manome, kad tai greičiausiai yra nuo 10 iki 20 metų.
AM: Kokius jutiklius ar mokslinę įrangą įsivaizduojate galinti apsivilkti šiais daiktais?
PB: Vaizdo gavimas yra akivaizdžiai kažkas, ko mes norėtume padaryti. Kadangi fotoaparatai tampa neįtikėtinai maži ir tvirti, jau yra tokių dydžių elementų, kuriuos būtų galima pritvirtinti prie šių daiktų. Kai kuriuose blokuose gali būti padidinimo galimybė, todėl būtų galima pažvelgti į medžiagų, ant kurių jie nutupia, faktūras. Viena iš ateities plėtros sričių yra mažų fotoaparatų padarytų vaizdų integravimas į daugybę skirtingų mažų elementų. Tai nepatenka į šio projekto taikymo sritį, tačiau būtent tai mes galvojame apie vaizdų kūrimą. Ir tada, be abejo, cheminiai jutikliai, gebantys užuosti ir pajusti cheminę aplinką, o tai yra labai svarbu. Viskas nuo mažų lazerio noselių iki jonams selektyvių dujų elektrodų.
Mes planuojame, kad jie būtų ne visi vienodi, o veikiau ansamblis, kuriame būtų pakankamai įvairių vienetų, turinčių įvairių rūšių jutiklius, kad tikimybė vis tiek būtų didelė, net atsižvelgiant į gana didelius vienetų skaičiaus praradimus, kad mes vis tiek turėtų visą komplektą jutiklių. Nepaisant to, kad kiekvienas atskiras įrenginys neturi didžiulės daviklių apkrovos, jums to gali pakakti, kad jis galėtų žymiai sutapti su savo kolegomis.
AM: Ar bus galima atlikti biologinius tyrimus?
PB: Aš taip manau. Ypač jei įsivaizduojate laikotarpį, į kurį žiūrime, atsižvelgiant į pažangą, pasiekiamą internete, pradedant kvantiniais taškais ir baigiant mikroschemų įrenginiais. Žinoma, sunku gauti mėginių medžiagą tiems. Bet kai mes susiduriame su mažais žemės paviršiaus kontaktų elementais, tokiais kaip mūsų šuoliniai mikrobotai, galbūt galėsite juos išdėstyti tiesiai ant medžiagos, kurią jie nori išbandyti. Kartu su mikroskopija ir platesnio lauko vaizdais manau, kad tai yra galimybė atlikti rimtą biologinį darbą.
AM: Ar turite idėją, kokie yra orientyrai, kuriuos tikitės pasiekti per savo dvejų metų projektą?
PB: Mes tikimės, kad iki kovo mėnesio turėsime neapdorotus prototipus, kurie turi reikiamą mobilumą. Bet tai gali būti per daug ambicinga. Kai turėsime mobiliuosius įrenginius, mūsų planas yra atlikti lauko bandymus tikruose lavos vamzdžių urvuose, kuriuos darome mokslo srityje Naujojoje Meksikoje.
Lauko svetainė jau išbandyta. Įeinant į I etapą, išėjo MIT grupė ir aš juos šiek tiek pamokiau apie urvo ruošimą ir tai, koks iš tikrųjų buvo reljefas. Tai jiems buvo didelis žvilgsnis. Projektuoti robotus MIT salėms yra vienas dalykas, bet dar vienas dalykas - kurti juos realaus pasaulio uolėtose aplinkose. Tai mums visiems buvo labai mokoma patirtis. Manau, kad jie turi gana gerą idėją, kokiomis sąlygomis jie turi atitikti savo dizainą.
AM: Kokios tos sąlygos?
PB: Nepaprastai nelygus reljefas, daugybė įtrūkimų, į kuriuos šie vaikinai galėjo laikinai įstrigti. Taigi mums reikės veikimo režimų, kurie leistų jiems išsigelbėti, bent jau turint pagrįstą galimybę pasisekti. Ryšio tarp žvilgsnio iššūkiai labai grubiame paviršiuje. Perlipimas per didelius riedulius. Įstringa mažuose įtrūkimuose. Tokio pobūdžio dalykai.
Lava nėra lygi. Lavos mėgintuvėlių vidus iš esmės yra lygus po jų formavimo, tačiau yra daugybė medžiagų, kurios susitraukia ir suskilinėja bei krinta žemyn. Taigi yra skaldos polių, kad būtų galima apeiti ir apvažiuoti, ir daug pakilti. Tai yra tai, ko neįprasti robotai neturi galimybių.
Originalus šaltinis: NASA Astrobiologija